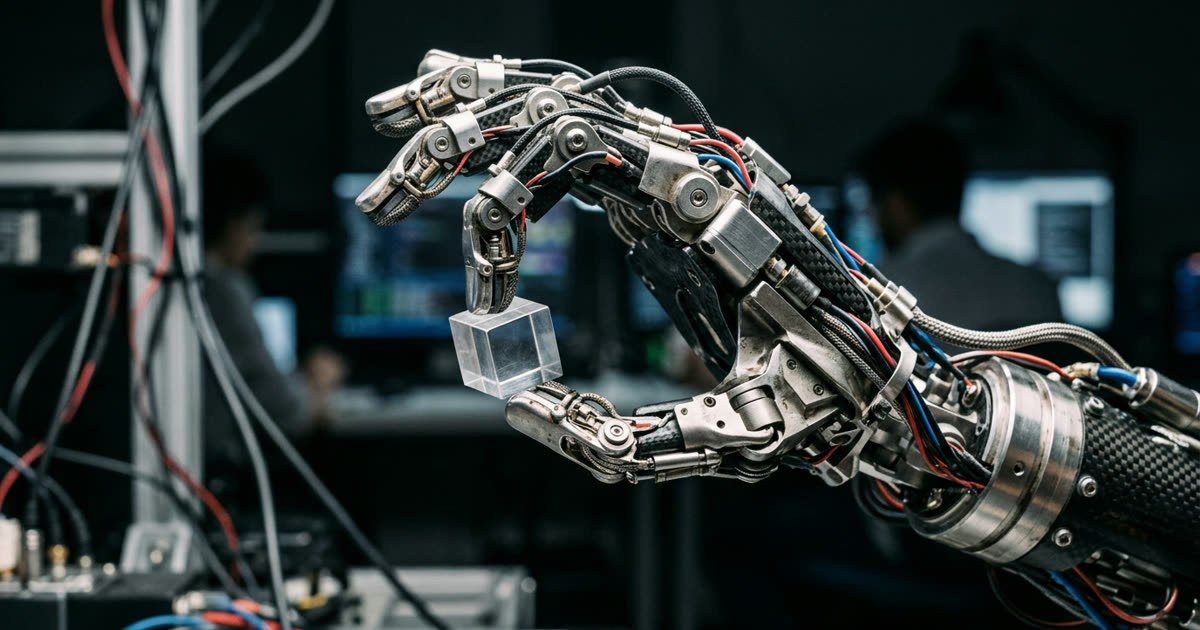
ホンダは2026年5月29日、東京で開催された「Humanoids Summit Tokyo 2026」において、新開発の多指ロボットハンドのプロトタイプを初公開した(Humans Alike)。Hondaの広報資料によれば、このハンドは人間の手に近い5本指構成を持ち、ケーブル駆動アクチュエータとオンデバイス触覚センサーを組み合わせた設計により、精密な把持と繊細な力加減を実現するという。
Humanoids Summitの主催者によれば、ホンダの発表は今回のサミットで最も注目を集めたセッションの一つだった。ASIMOが2022年に正式引退して以降、ホンダはヒューマノイドロボット分野での公式な研究開発情報発信を抑制してきたが、今回の発表はその沈黙を破るものとして業界関係者の関心を引いた。
なぜ「手」が重要なのか
ヒューマノイドロボットの実用化における最大の技術的ボトルネックの一つが巧みな手先操作(デクスタラス・マニピュレーション)だ。足や胴体の動作制御に比べ、指先レベルの力加減や把持形状の適応は格段に難しく、多くのロボットが汎用的な把持タスクで苦労している。ホンダの多指ハンドはこの課題に正面から向き合うアプローチであり、製造・医療・家庭補助など多様な応用分野への応用可能性を持つ。
日本のヒューマノイド研究の文脈
日本はASIMOやHRP-2など、ヒューマノイドロボット研究の歴史的な先進国だ。しかし近年は中国の[BRAND-unitree](ユニツリー・ロボティクス)や米国のFigure、1Xなどのスタートアップに技術的な話題をさらわれる場面が増えていた。ホンダの今回の発表は、日本の大手メーカーが精密機械と材料技術で培った伝統的強みを活かしたフィジカルAI開発に回帰する可能性を示唆している。
三菱電機と千葉工業大学の連携協定(同月発表)と合わせて考えると、2026年5月は日本のヒューマノイドロボット研究が新局面に入ったターニングポイントとして記憶されるかもしれない。ホンダが次のフェーズとして完全統合型のヒューマノイドプラットフォームを目指すのか、あるいは多指ハンドを独立モジュールとして他社に提供するのか、今後の発表が待たれる。